Inverse Kinematics
Inverse Kinematics using FABRIK
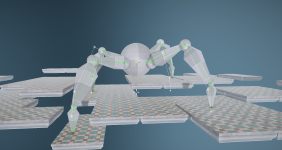
Building a four-legged robotic spider that can walk on uneven surfaces using inverse kinematics in C++ by using F.A.B.R.I.K, an industry standard method implemented in engines such as Unreal and Unity.